











有限公司")


松下MHMF012L1+MADLT05SF伺服机电原厂原装
连接器控制信号输入通用10输入
根据参数选择通用输入功能
输出通用6输出
根据参数选择通用输出功能
模拟信号输入3输入(16 bitA/D输入1、12 bitA/D输入2)

输出2输出(模拟监视器输出2)
脉冲信号输入2输入(光电耦合器输入、长线接收器输入)
通过光电耦合器输入,可对应长线驱动器I/F・开路集电极I/F
通过长线接收器输入,可对应长线驱动器I/F
输出4 输出(长线驱动输出3、开路集电极输出1)
编码器反馈脉冲(A・B・Z 相) 或者外部位移传感器脉冲(EXA・ EXB・EXZ 相) 通过长线驱动器输出。
Z 相或者 EXZ 相脉冲也有开路集电极输出。
通信功能USB可连接电脑等进行参数设定以及状态监视等。
RS232可与上位控制器进行1 :1 通信。
RS485可与上位控制器进行1 :1 通信。
安全功能为对应功能安全的端子
前面板①按键 5 个 ②LED 6 位
回生A 型, B 型:无内置再生电阻(只有外置) C 型~F 型:内置再生电阻(可外置)
动态制动器A 型~F 型:内置
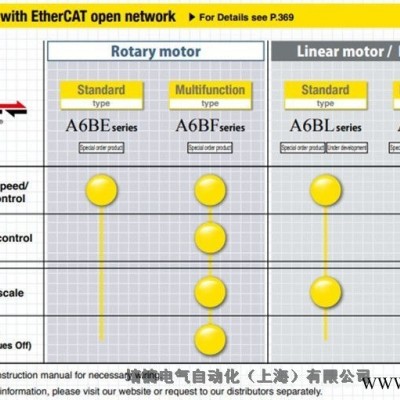
控制模式①位置控制 ②速度控制 ③转矩控制 ④位置/速度控制 ⑤位置/转矩控制 ⑥速度/转矩控制 ⑦全闭环控制 7个模式通过参数进行切换
※1 请注意,温度降低时湿度上升,容易产生结露。
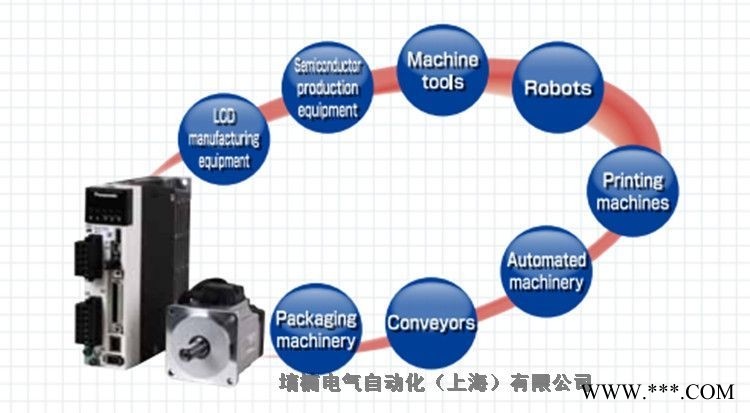
50 W~22 kW,电压: DC 24 V / 48 V · AC 100 V / 200 V / 400 V,23 bit 式/增量式 · 无电池式/增量编码器,响应频率: 3.2 kHz实现了极速正确动作的, 高速响应・高精度定位。、
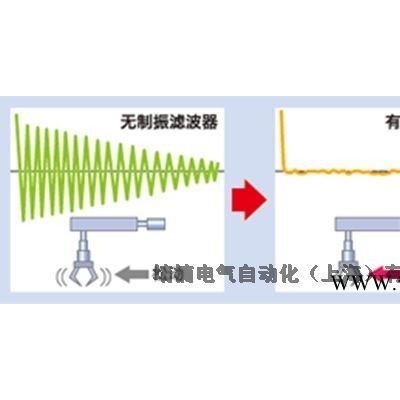
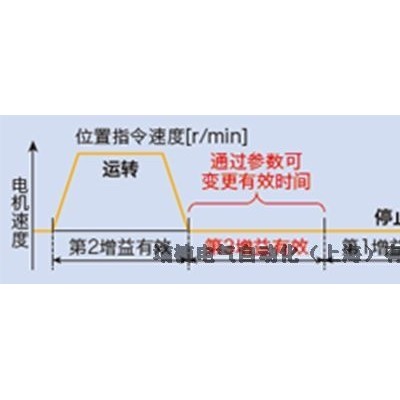
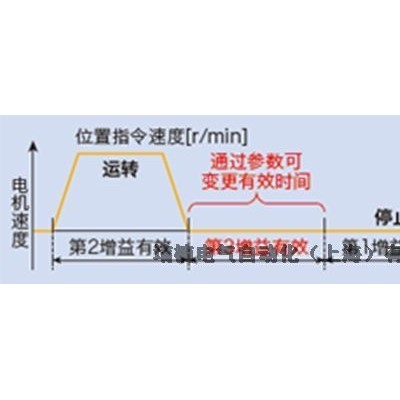
通过CPU等硬件的更新以及搭载了当社特定开发的新型算法,实现了更高速的响应性。同时,可自动去除根据共振产生的微振动、根据机械的摇动产生的振动等,实现了高精度的定位。 通过简单的快速设定、整定时间与以前相比减少约64%<su
松下MHMF012L1+MADLT05SF伺服机电原厂原装





 伺服电机是高输出无刷电机MPL-A1510V-VJ72AA")




