
















以下 磁电机转子动平衡机详细信息 是由 发布:广州卓玄金机械设备有限公司的注册者发布者提供 一、概述: 圈带动平衡机特点:是利用橡胶环形带或丝织环形带,由电机皮带轮拖动转子,因此圈带拖动要求转子表面必须有光滑的圆柱表面,圈带拖动的优点是不影响转子的不平衡量,平衡**度高。 二、详细说明:
圈带动平衡机技术协议
平衡机发展迄今已经有一百多年的历史,随着电子技术的发展和刚性转子平衡理论的普及,在提高产品品质的前提下,需要进行平衡的零部件也越来越多,五十年代后大部分平衡设备都采用了动平衡技术,动平衡机有效的**了平衡工件左右面的相互影响,平衡机是减小振动、改善性能和提高质量的必不可少的设备。
平衡机分桥架设备与电测控制设备,通常,转子的平衡包括不平衡量的测量和校正两个步骤。平衡机拖动转子的传动方式有圈带拖动,联轴节拖动和自驱动。
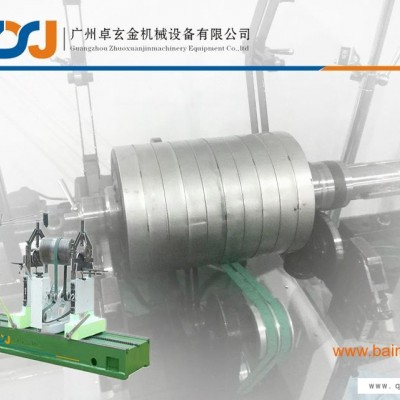
圈带动平衡机特点:是利用橡胶环形带或丝织环形带,由电机皮带轮拖动转子,因此圈带拖动要求转子表面必须有光滑的圆柱表面,圈带拖动的优点是不影响转子的不平衡量,平衡**度高。
圈带动平衡机应用范围:**应用于0.5-16公斤内轴类转子如:小电机马达转子、水泵、风叶、叶轮、曲轴,滚筒及轴类等旋转工件的平衡校正。
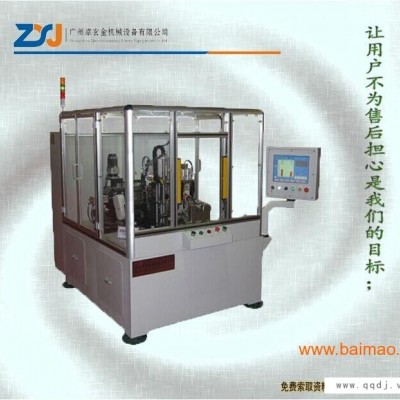
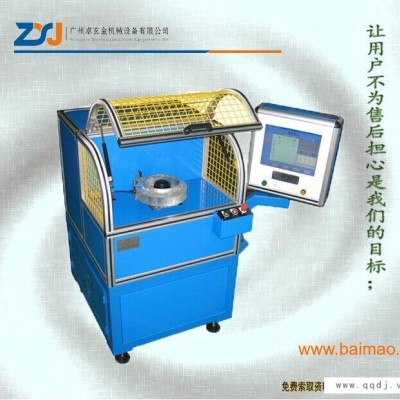
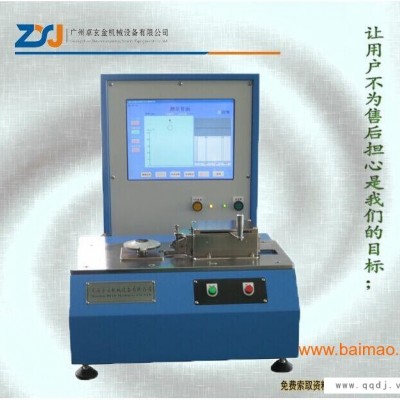
圈带动平衡机测量系统:动平衡测量采用多种电测系统,数码显示系统、电脑工控系统,其中电脑工控测量方式多样化,动、静平衡,支承方式多达10种,加去重、正反转可灵活定制。
数码显示系统**,测量界面直观,易操作;
电脑工控系统测量**度高,采用多重定标系数组合,自动调整系统灵敏度,换档无跳跃,软硬件双重滤波,高速数据压缩,测量更稳、更准、更快;
| 技术参数 | ZXJPHQ-1.6 | ZXJPHQ-5 | ZXJPHQ-** | ZXJPHQ-16A | 备注 |
| 工件质量范围(kg) | 0.5-1.6 | 1-5 | 1-5 | 1.6-16 |
|
| 工件外径(mm) | Φ300 | Φ300 | Φ300 | Φ300 |
|
| 两支承座间距离(mm) | 15~450 | 15~450 | 60~450 | 60~450 |
|
| 支承轴径范围(mm) | Φ 3~40(120°) | Φ 3~40(120°) | Φ 5~40 | Φ 5~40 |
|
| 圈带传动处直径范围(mm) | Φ20~85 | Φ20~85 | Φ15~150 | Φ15~150 |
|
| 工件传动处直径为100mm时的转速(r/min) | 500,650,1000,1340 | 500,650,1000,1340 | 680,1200 | 680,1200 |
|
| 电动机功率(kw) | 0.12 | 0.12 | 0.25 | 0.25 |
|
| 小可达剩余不平衡度 (emar) | 0.3g· mm/kg | 0.3g· mm/kg | 0.3g· mm/kg | 0.3g· mm/kg |
|










